
本网讯 近日,我校人工智能与计算机学院魏明鑫博士的论文《Learning-Based Quadratic Programming for Safe Trajectory Tracking of Quadrotor UAVs in Dynamic Environments》被IEEE工业电子学会旗舰期刊《IEEE Transactions on Industrial Electronics》(简称TIE)正式录用。该论文由魏明鑫博士担任第一作者,韩涛教授为通信作者,企业导师郑蓝翔博士、梅瑞冬博士及中国地质大学葛明峰教授为共同作者,湖北师范大学为论文唯一通讯单位。
《IEEE Transactions on Industrial Electronics》是中科院工程技术大类一区Top期刊,同时也是中国自动化学会(CAA)推荐的A类期刊、中国计算机学会(CCF)推荐的C类期刊,最新影响因子为7.5,在工业电子、控制理论、机器人技术等领域具有广泛的国际影响力和权威性,是该领域科研成果发表的重要高端平台。
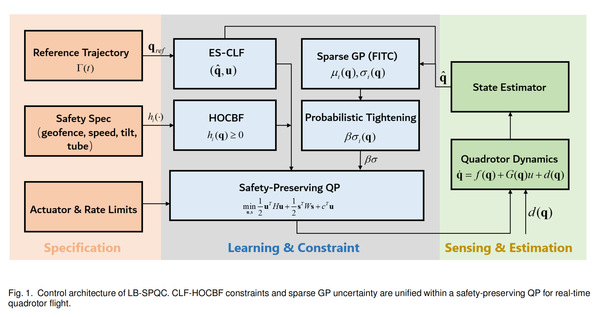
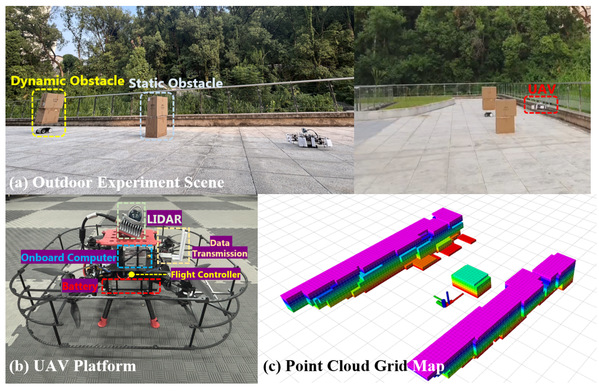
此次研究聚焦动态复杂环境下四旋翼无人机精准轨迹跟踪与安全避障的核心技术难题,团队创新提出学习型安全保持二次控制框架(LB-SPQC),实现了自适应学习与严格安全稳定性约束的深度融合。该框架通过基于高斯过程的扰动观测器完成在线超参数优化,可提供实时不确定性量化与概率误差界;依托统一二次规划架构,结合鲁棒控制李雅普诺夫函数(CLF)与高阶控制屏障函数(HOCBF),在考虑执行器饱和约束的基础上,同时保障无人机飞行的指数稳定性与碰撞避免能力;并设计高效稀疏近似方案,大幅降低高斯过程计算复杂度,确保该方法可在嵌入式硬件上实现实时运行。经过仿真测试与实际飞行双重验证,该框架在风扰、动态障碍物等挑战性条件下展现出优越的控制性能,为复杂环境下无人机的安全可靠飞行提供了全新技术方案,未来可广泛应用于复杂地下矿洞勘探、低空巡检等实际场景,为低空经济发展提供技术支撑。
作者简介:魏明鑫,湖北师范大学人工智能与计算机学院专职科研教师,多机器人协同控制实验室(MRCC Lab)负责人,硕士生导师。主要研究方向包括无人系统自主安全学习控制、具身智能、空中机器人灵巧操作及复杂环境自主探索,相关成果应用于低空经济中的无人机巡检与特殊空间智能飞行器等领域。在IEEE T-RO、TIE、RAL、T-ASE、ICRA、IROS等机器人领域顶级期刊与会议发表论文10余篇。主持湖北省自然科学基金青年基金、广东省研究生科研项目及横向项目2项,并作为核心骨干参与国家重点研发计划、军委科技委项目、科技创新2030重大项目等科研项目。